Bişirilen anod arassalaýjy robot





Bişirilen anod arassalaýjy robot
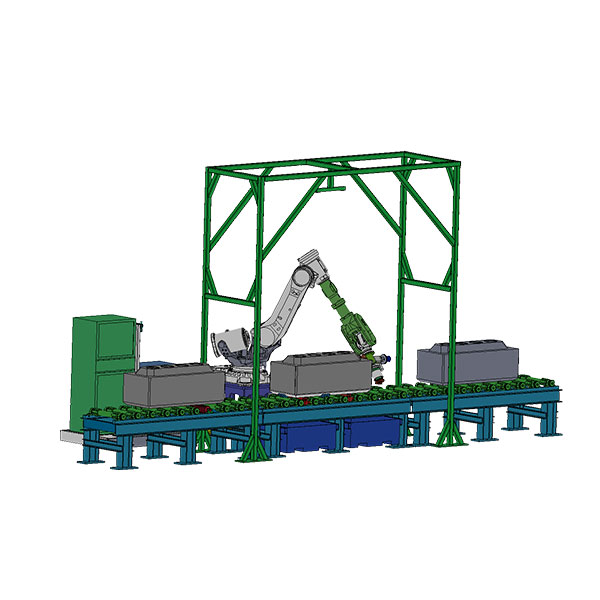
Bişirilen anod arassalaýjy robot, alýumin zawodlary üçin bişirilen anodlary arassalamak we ýuwmak wagtynda kompaniýamyz tarapyndan işlenip düzülen emeli akylly ýalpyldawuk robotdyr.
Çuňňur öwreniş kamerasy anod bloklaryny surata düşürer, bulut gaýtadan işlenenden we 3D şekillendirişden soň, anod bloklarynyň üç ölçegli koordinatlaryny robota iberer, soňra robot anod bloklarynyň üstlerini, çukur deşiklerini we tüýdüklerini arassalar, tozan ýygnaýan enjam Robot çukur deşiklerini arassalaýarka gaplamak üçin koks alyň.
Ulgam konfigurasiýasy
1 Wizual şekillendiriş ulgamy we programma üpjünçiligi
2 Robot we ýalpyldawuk ulgam
3 Toz ýygnamak we elektrik dolandyryş ulgamy
4 Anod iberiş ulgamyny bloklaýar
Üstünlikleri
1.Akylly real wagt manysy
Kompaniýamyz tarapyndan özbaşdak gözlenýän we işlenip düzülen çuňňur öwreniş algoritmi, robotyň polat hereketlerini sazlamak üçin uglerod bloklarynyň ýagdaýyny we robotyň hakyky ýagdaýyny duýup biler.
2. Çeýe polishing
Floüzýän degirmen kesiji çotga, robotyň uglerod bloklaryna zyýan bermezden anod bloklarynyň üstünde azajyk ýapyşýan gaplaýyş koksyny aýyrmagyna mümkinçilik berýär.
3. Tozansyz arassalaň
Toz ýygnaýan enjam, anod bloklaryndan aýrylan gaplama koksyny alyp biler we el bilen arassalamagyň zerurlygy ýok.
4. Çukur çukurlarynda tüýdükleri gaty arassalamak
Çukur deşiklerindäki tüýdükler, gaplaýan koks taýagyny düýpli arassalap bilýän degirmen kesiji bilen arassalanýar.

Çukury arassalamak tehnologiýalary
1.Fleýta arassalaýjy degirmen kesiji
Çukuryň çukuryny arassalamak, gaplaýyş koksyny arassalap bilýän ýokary tizlikli aýlanýan freze kesiji bilen tamamlanýar.
Hiç hili täsir güýji ýok, manipulýatoryň täsir zeperinden netijeli gaça duruň we manipulýatoryň işleýiş takyklygyny üpjün ediň.
2.Akylly duýgurlyk mehanizmi
Spiral gyryjy tizlik datçigi bilen enjamlaşdyrylandyr.Haçan-da demir bar bolsa
koksy gaplamak, üwemegi bes etmek we bermek üçin tizlik çalt azalýar
duýduryş.
3. Çukuryň siňdiriş mehanizmi
Spiral gyryjy, çukuryň içindäki gaplaýyş koksyny we gaplamany döwüp biler
koks ortadaky sorujy turba bilen sorulýar.
Anod ýerüsti arassalaýyş tehnologiýalary
1. Dolandyryşda ýüzýän arassalaýyş mehanizmi
Basyş güýji, ýokary duýgurlyk we çalt seslenme bilen piezoelektrik proporsional klapan tarapyndan dolandyrylýan silindr arkaly amala aşyrylýar.
2.Ball geçiriş mehanizmi
Kuwwatly geçiriji, ýokary basyş dolandyryş takyklygy, kiçijik aýlanýan sürtülme we gural gysylmazlygy bilen top geçirişini kabul edýär.
3.Kutter kelläniň burçy ýüzýär
Kesiji kellesi iş bölegi bilen ýakyndan sazlamak üçin burç kellesinde ýüzýär.
4. Almak we akylly gözegçilik
Çaltlyk we süýşme datçikleri bilen iş wagty dürli üweýji parametrleri hakyky wagtda üýtgetmek üçin iş wagtynda hakyky seslenme signallary berilýär.
iň gowy arassalaýyş effektini gazanmak.
5. Özüňe daýanmak funksiýasy
Programmanyň öz-özüni öwrenmek funksiýasy bar.Maglumatlar bazasynda näçe köp maglumat toplansa, üweýiş effekti şonça gowy bolar.
6.Kutter dizaýny we material saýlamak
Kesiji kellesi berk we çydamly Cr12 garyndy polatdan ýasalýar.Pyçagyň ujy wolfram polat pyçagyny gutarýar, ony çalyşmak aňsat.